Most people who have developed software have at some point or another used virtualization technology. Software development for PLCs in a virtual environment is often overlooked, since PLC development is so close to the hardware. Nevertheless, there are still advantages. Working for several projects with various requirements, but where a Beckhoff PLC/TwinCAT was the common delimiter, made me ask myself “How much use of virtualization can I do for TwinCAT software development?”
TwinCAT & virtualization

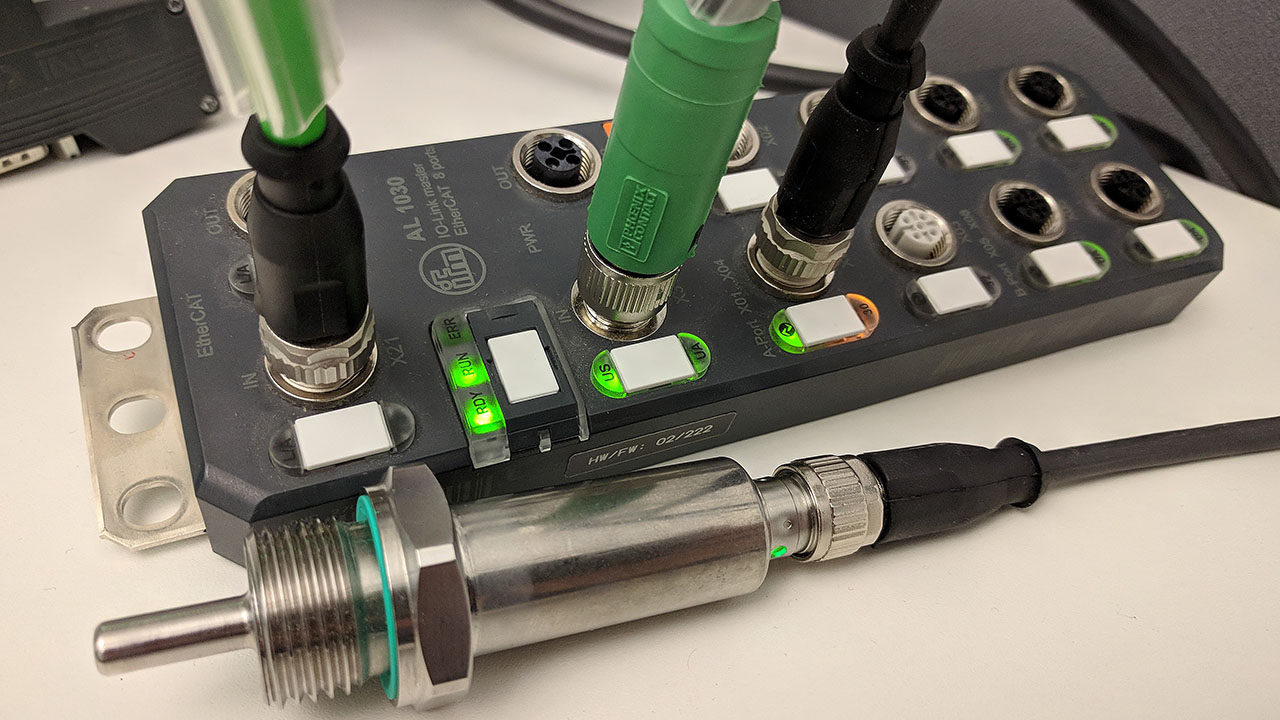
 We’re finally at the last post of this series! Patiently we’ve written all our tests and done all our code that implements the required functionality and made sure that our code passes all the tests. But in the end of the day, despite all the theory and coding we want our code to run on a real physical device. Now it’s time for the favorite part of every PLC programmer, which is getting down to the hardware and micro controllers! Let’s get to the grand finale, and test our code on a real PLC, IO-Link master and IO-Link slave.
We’re finally at the last post of this series! Patiently we’ve written all our tests and done all our code that implements the required functionality and made sure that our code passes all the tests. But in the end of the day, despite all the theory and coding we want our code to run on a real physical device. Now it’s time for the favorite part of every PLC programmer, which is getting down to the hardware and micro controllers! Let’s get to the grand finale, and test our code on a real PLC, IO-Link master and IO-Link slave.