 Some time ago I wrote a post about developing code for different runtimes, and since then I’ve come to the realization that there is so much information missing in that blog post that I simply needed to write another one. What’s even worse is that the information regarding development, deployment, and just general handling of several TwinCAT versions on the Beckhoff website is not that good. I’ve talked to numerous automation engineers regarding this topic, and everyone seems to have a different understanding about it. As I was working in a development project that had many PLCs (hundreds!) with different versions of TwinCAT, I finally had a good excuse to dive into the details of this. With this blog post, I’d like to share some of the facts and misconceptions.
Some time ago I wrote a post about developing code for different runtimes, and since then I’ve come to the realization that there is so much information missing in that blog post that I simply needed to write another one. What’s even worse is that the information regarding development, deployment, and just general handling of several TwinCAT versions on the Beckhoff website is not that good. I’ve talked to numerous automation engineers regarding this topic, and everyone seems to have a different understanding about it. As I was working in a development project that had many PLCs (hundreds!) with different versions of TwinCAT, I finally had a good excuse to dive into the details of this. With this blog post, I’d like to share some of the facts and misconceptions.
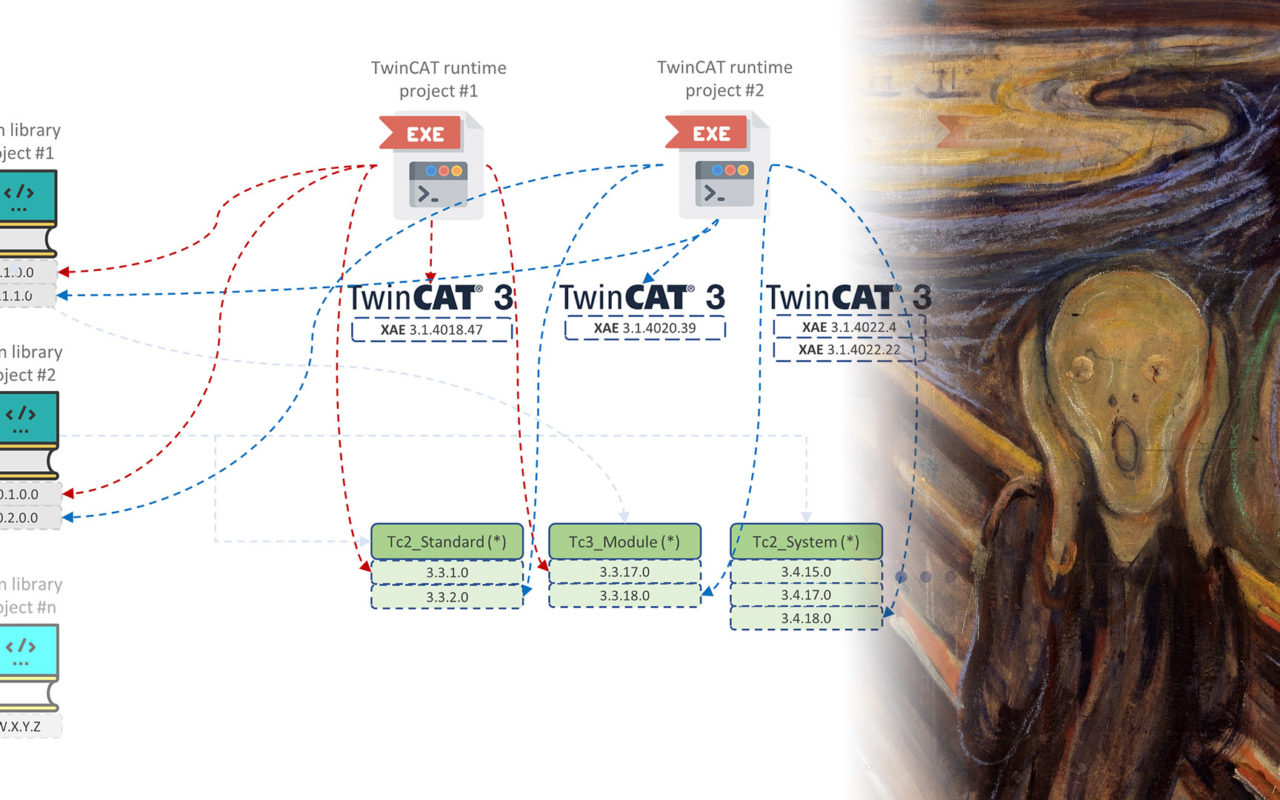
Handling different versions of TwinCAT