The Arduino PLC and the Arduino PLC IDE… there has been a lot of buzz around it since it was announced recently. I’m a long-time user of the Arduino eco-system and have been using their IDE for over 10 years for various projects. Guess if I was surprised when they released their new IDE aimed at the industrial automation industry! The Arduino PLC IDE only supports one board right now, the Arduino Portenta Machine Control, and luckily I had just been using one of these boards for another project recently, so I could try the new PLC IDE that Arduino have released.
I thought I’d share my initial impressions, findings, praises & complaints with all of you by making a YouTube video where I go through the complete process of installing the IDE and configuring one Arduino board to run a simple PLC program.



 Some time ago I
Some time ago I 
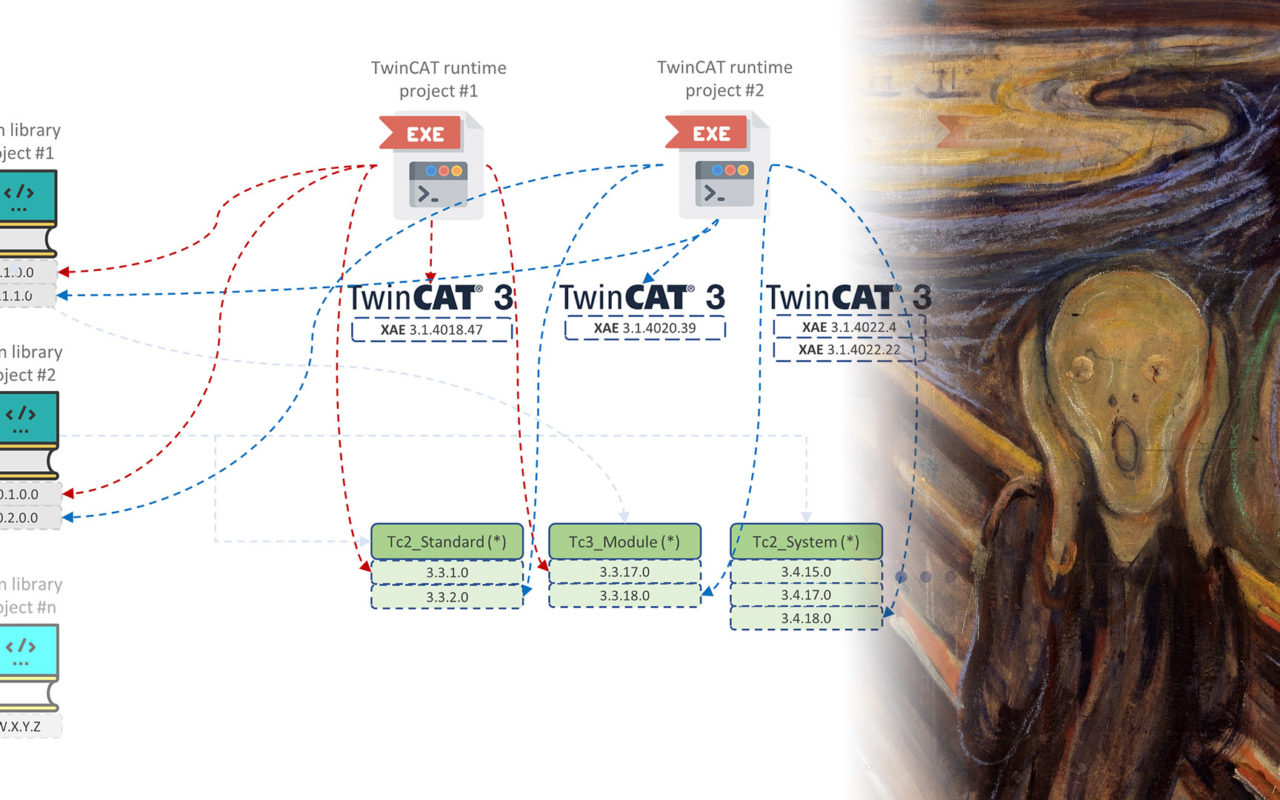
 I have been using TwinCAT for quite some time now, and since I started developing software with TwinCAT it has changed almost everything for me as a software engineer, both as a profession and as a hobby. This includes the programming language, development environment, software development processes, hardware, communication protocols and much more. I have recently philosophized about how my life as a software developer has changed compared prior to doing automation software. Overall, I would say that I can do tremendously more things (in a reasonable amount of time) with TwinCAT by myself, than I could do before when I was developing software in the “standard” programming languages. It has given me opportunities to work with insanely fun projects that I would never have worked with if I didn’t start with PLC software development. What I would want to share with you is a list of five things that I think Beckhoff have done right, and five things that they could improve.
I have been using TwinCAT for quite some time now, and since I started developing software with TwinCAT it has changed almost everything for me as a software engineer, both as a profession and as a hobby. This includes the programming language, development environment, software development processes, hardware, communication protocols and much more. I have recently philosophized about how my life as a software developer has changed compared prior to doing automation software. Overall, I would say that I can do tremendously more things (in a reasonable amount of time) with TwinCAT by myself, than I could do before when I was developing software in the “standard” programming languages. It has given me opportunities to work with insanely fun projects that I would never have worked with if I didn’t start with PLC software development. What I would want to share with you is a list of five things that I think Beckhoff have done right, and five things that they could improve.