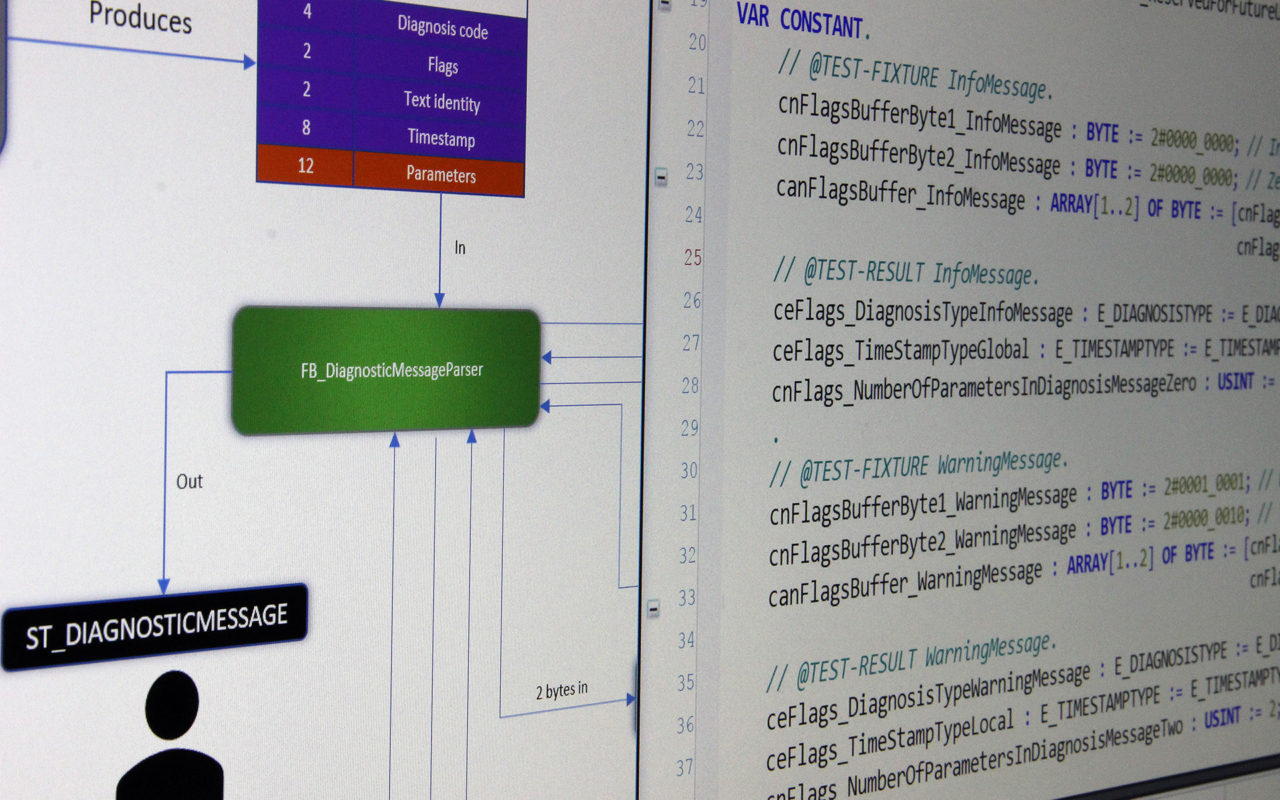
In my previous post I explained some of the benefits of using test driven development (TDD) while developing PLC software. This post is the second part of a series of seven, where we will look at a real use case scenario of writing test cases prior to doing the actual implementation. The scenario which I thought would be good for this is by creating a parser for IO-Link events. Shortly, IO-Link is a standardized point-to-point serial communication protocol used to communicate with sensors and/or actuators. It is not a fieldbus, but only takes care of the communication to the end device. As it’s a fully digital protocol that on top of process data also supports services such as events and parameterization, it’s standing well prepared for the Industry 4.0 thinking. One of the functionalities of IO-Link devices is that they can fire off events to the IO-Link master to notify that something has happened, for instance an alarm that something is wrong. To integrate these IO-link devices (slaves) into your EtherCAT network you need an IO-Link master, which usually allows you to connect 4 or 8 IO-Link slaves.
In my previous post I explained some of the benefits of using test driven development (TDD) while developing PLC software. This post is the second part of a series of seven, where we will look at a real use case scenario of writing test cases prior to doing the actual implementation. The scenario which I thought would be good for this is by creating a parser for IO-Link events. Shortly, IO-Link is a standardized point-to-point serial communication protocol used to communicate with sensors and/or actuators. It is not a fieldbus, but only takes care of the communication to the end device. As it’s a fully digital protocol that on top of process data also supports services such as events and parameterization, it’s standing well prepared for the Industry 4.0 thinking. One of the functionalities of IO-Link devices is that they can fire off events to the IO-Link master to notify that something has happened, for instance an alarm that something is wrong. To integrate these IO-link devices (slaves) into your EtherCAT network you need an IO-Link master, which usually allows you to connect 4 or 8 IO-Link slaves.
Test driven development in TwinCAT – Part 2
 lopment (TDD) doesn’t seem to be all too common among TwinCAT-developers, which is a shame. From my experience, TDD has a strong foothold everywhere among developers, but TwinCAT? Not so much. And I don’t blame them. There are TDD frameworks for C++, C#, Ada, Python and basically any other language and/or development environment. Do a Google search on the web on any programming language/IDE and TDD and you get thousands of results. Do the same for TwinCAT and you’re on your own.
lopment (TDD) doesn’t seem to be all too common among TwinCAT-developers, which is a shame. From my experience, TDD has a strong foothold everywhere among developers, but TwinCAT? Not so much. And I don’t blame them. There are TDD frameworks for C++, C#, Ada, Python and basically any other language and/or development environment. Do a Google search on the web on any programming language/IDE and TDD and you get thousands of results. Do the same for TwinCAT and you’re on your own.
 Together with TwinCAT release 4022.0 Beckhoff released their product “
Together with TwinCAT release 4022.0 Beckhoff released their product “