
While doing software development in TwinCAT, I have always been missing some sort of generic data type/container, to have some level of conformance to generic programming. “Generic programming… what’s that?”, you may ask. I like Ralf Hinze’s description of generic programming:
A generic program is one that the programmer writes once, but which works over many different data types.
I’ve been using generics in Ada and templates in C++, and many other languages have similar concepts. Why was there no such thing available in the world of TwinCAT/IEC 61131-3? For a long time there was a link to a type “ANY” in their data types section of TwinCAT3, but the only information available on the website was that the “ANY” type was not yet available. By coincidence I revisited their web page to check it out, and now a description is available! I think the documentation has done a good job describing the possibilities with the ANY-type, but I wanted to elaborate with this a little further.


 If you’ve done development in TwinCAT for some time, you’ve most likely come across at least one of the
If you’ve done development in TwinCAT for some time, you’ve most likely come across at least one of the 
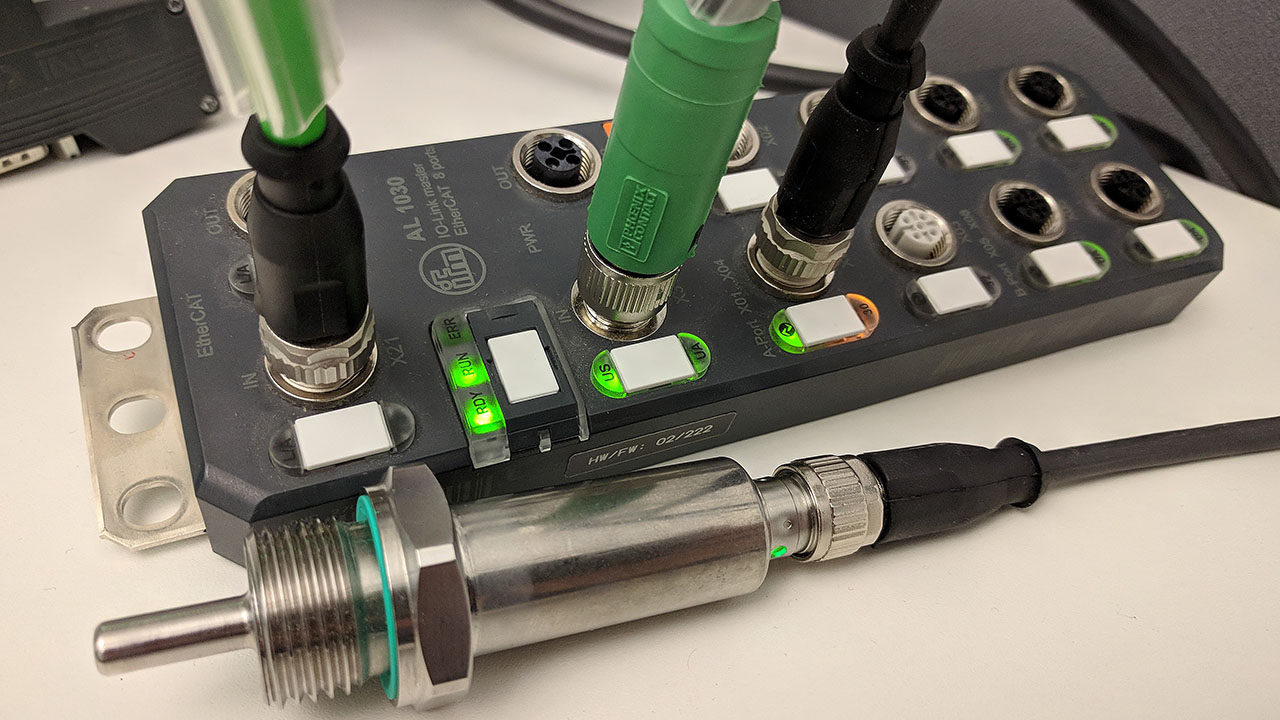
 We’re finally at the last post of this series! Patiently we’ve written all our tests and done all our code that implements the required functionality and made sure that our code passes all the tests. But in the end of the day, despite all the theory and coding we want our code to run on a real physical device. Now it’s time for the favorite part of every PLC programmer, which is getting down to the hardware and micro controllers! Let’s get to the grand finale, and test our code on a real PLC, IO-Link master and IO-Link slave.
We’re finally at the last post of this series! Patiently we’ve written all our tests and done all our code that implements the required functionality and made sure that our code passes all the tests. But in the end of the day, despite all the theory and coding we want our code to run on a real physical device. Now it’s time for the favorite part of every PLC programmer, which is getting down to the hardware and micro controllers! Let’s get to the grand finale, and test our code on a real PLC, IO-Link master and IO-Link slave.
 In
In  In the last post of the series of unit testing in TwinCAT we finalized our unit tests, thus creating the acceptance criteria for the expected functionality for our function blocks. Now it’s time to do the actual implementation of the function blocks that we described in
In the last post of the series of unit testing in TwinCAT we finalized our unit tests, thus creating the acceptance criteria for the expected functionality for our function blocks. Now it’s time to do the actual implementation of the function blocks that we described in 
 In the
In the 
 In the
In the