 In my earlier posts I’ve written about development of TwinCAT software using test driven development (TDD), by writing unit tests. One of the advantages by adhering to the process of TDD is that you mostly will end up with function blocks (FBs) which have limited but well defined responsibility. Eventually you will however have FBs that are dependent on other function blocks. These could be FBs that are your own, or part of some 3rd party library, for example a Beckhoff library. Further, what if this external FB relies on some other functionality such as external communication using sockets that we have no control of? The external FBs should already be tested, we’re only interested in making sure our unit tests test our code! What do we do? A solution to this is to mock the external functionality and use dependency injection.
In my earlier posts I’ve written about development of TwinCAT software using test driven development (TDD), by writing unit tests. One of the advantages by adhering to the process of TDD is that you mostly will end up with function blocks (FBs) which have limited but well defined responsibility. Eventually you will however have FBs that are dependent on other function blocks. These could be FBs that are your own, or part of some 3rd party library, for example a Beckhoff library. Further, what if this external FB relies on some other functionality such as external communication using sockets that we have no control of? The external FBs should already be tested, we’re only interested in making sure our unit tests test our code! What do we do? A solution to this is to mock the external functionality and use dependency injection.
Mocking objects in TwinCAT


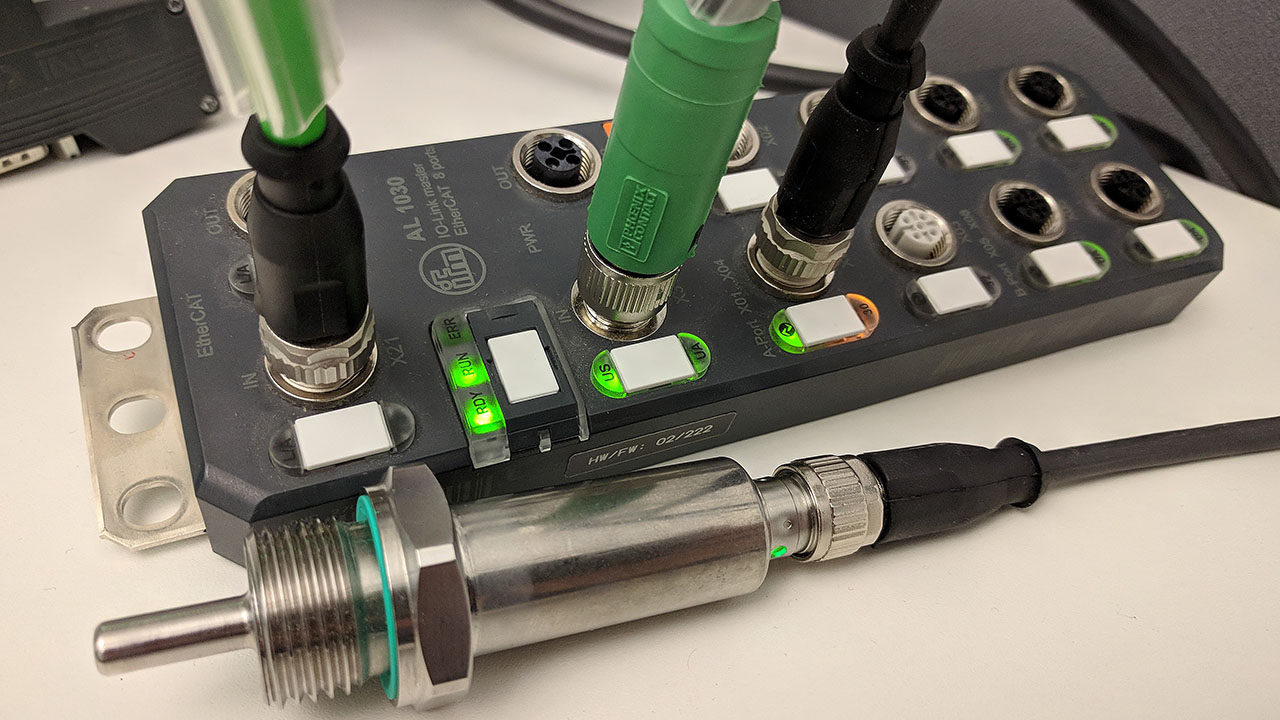
 We’re finally at the last post of this series! Patiently we’ve written all our tests and done all our code that implements the required functionality and made sure that our code passes all the tests. But in the end of the day, despite all the theory and coding we want our code to run on a real physical device. Now it’s time for the favorite part of every PLC programmer, which is getting down to the hardware and micro controllers! Let’s get to the grand finale, and test our code on a real PLC, IO-Link master and IO-Link slave.
We’re finally at the last post of this series! Patiently we’ve written all our tests and done all our code that implements the required functionality and made sure that our code passes all the tests. But in the end of the day, despite all the theory and coding we want our code to run on a real physical device. Now it’s time for the favorite part of every PLC programmer, which is getting down to the hardware and micro controllers! Let’s get to the grand finale, and test our code on a real PLC, IO-Link master and IO-Link slave.
 In
In  In the last post of the series of unit testing in TwinCAT we finalized our unit tests, thus creating the acceptance criteria for the expected functionality for our function blocks. Now it’s time to do the actual implementation of the function blocks that we described in
In the last post of the series of unit testing in TwinCAT we finalized our unit tests, thus creating the acceptance criteria for the expected functionality for our function blocks. Now it’s time to do the actual implementation of the function blocks that we described in 
 In the
In the 
 In the
In the 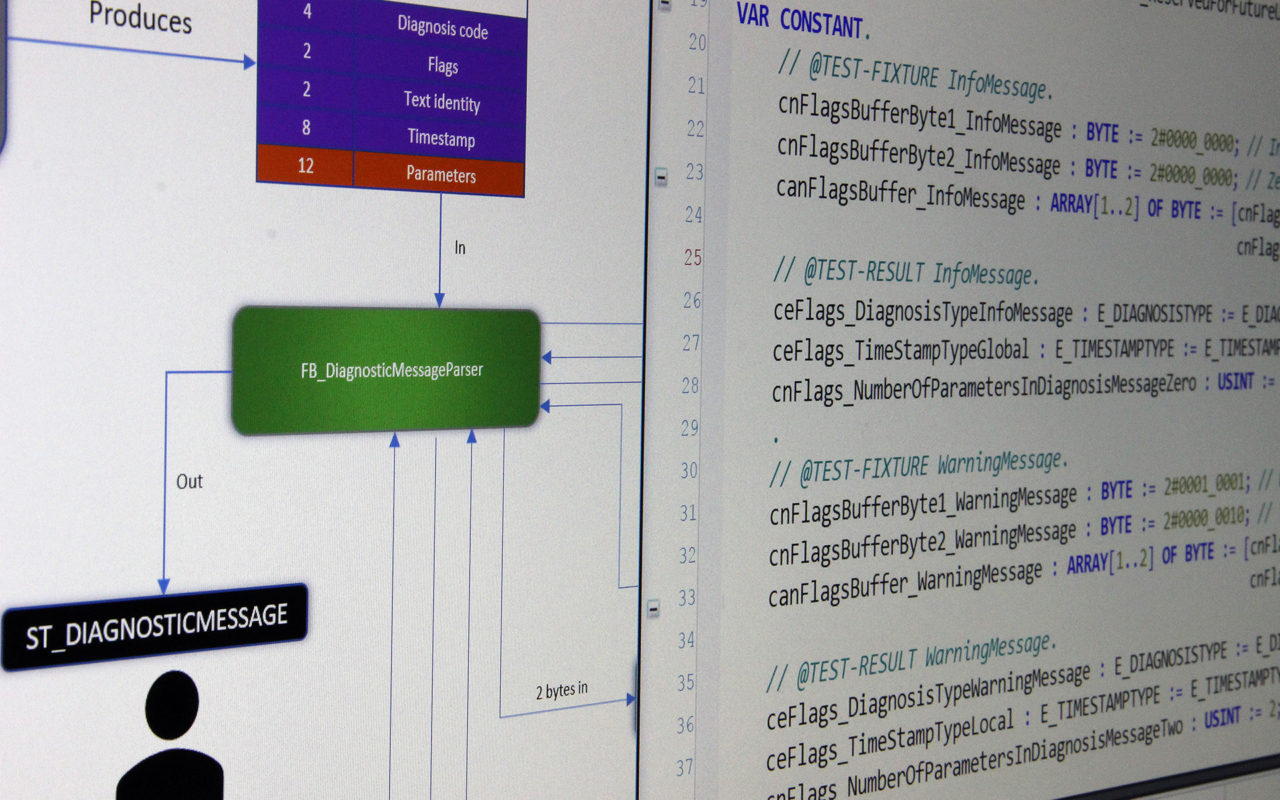
 In my
In my