 When being in an early phase of a project, it’s common to use “latest and greatest” of the dependencies that your software relies on. In the beginning of a project, it’s usually low risk to built your system on the latest of everything as you’ve got plenty of time to make sure everything works as expected. I guess that’s one of the many joys of starting a new project, you are more free and can experiment more. But as you get closer and closer to the delivery of the project, it’s usually a good idea to start and “freeze” parts of the software. This includes everything from own developed libraries, TwinCAT supplied libraries, drivers, TwinCAT runtime and even the operating system on the target device (which anyways doesn’t change too often). Twenty years from now, I want to be able to compile and build the exact same executable binary that is running on that nice expensive machine right now. When I was close to delivery of a TwinCAT project, I got some problems related to this topic.
When being in an early phase of a project, it’s common to use “latest and greatest” of the dependencies that your software relies on. In the beginning of a project, it’s usually low risk to built your system on the latest of everything as you’ve got plenty of time to make sure everything works as expected. I guess that’s one of the many joys of starting a new project, you are more free and can experiment more. But as you get closer and closer to the delivery of the project, it’s usually a good idea to start and “freeze” parts of the software. This includes everything from own developed libraries, TwinCAT supplied libraries, drivers, TwinCAT runtime and even the operating system on the target device (which anyways doesn’t change too often). Twenty years from now, I want to be able to compile and build the exact same executable binary that is running on that nice expensive machine right now. When I was close to delivery of a TwinCAT project, I got some problems related to this topic.
Managing TwinCAT libraries


 If you’ve done development in TwinCAT for some time, you’ve most likely come across at least one of the
If you’ve done development in TwinCAT for some time, you’ve most likely come across at least one of the 
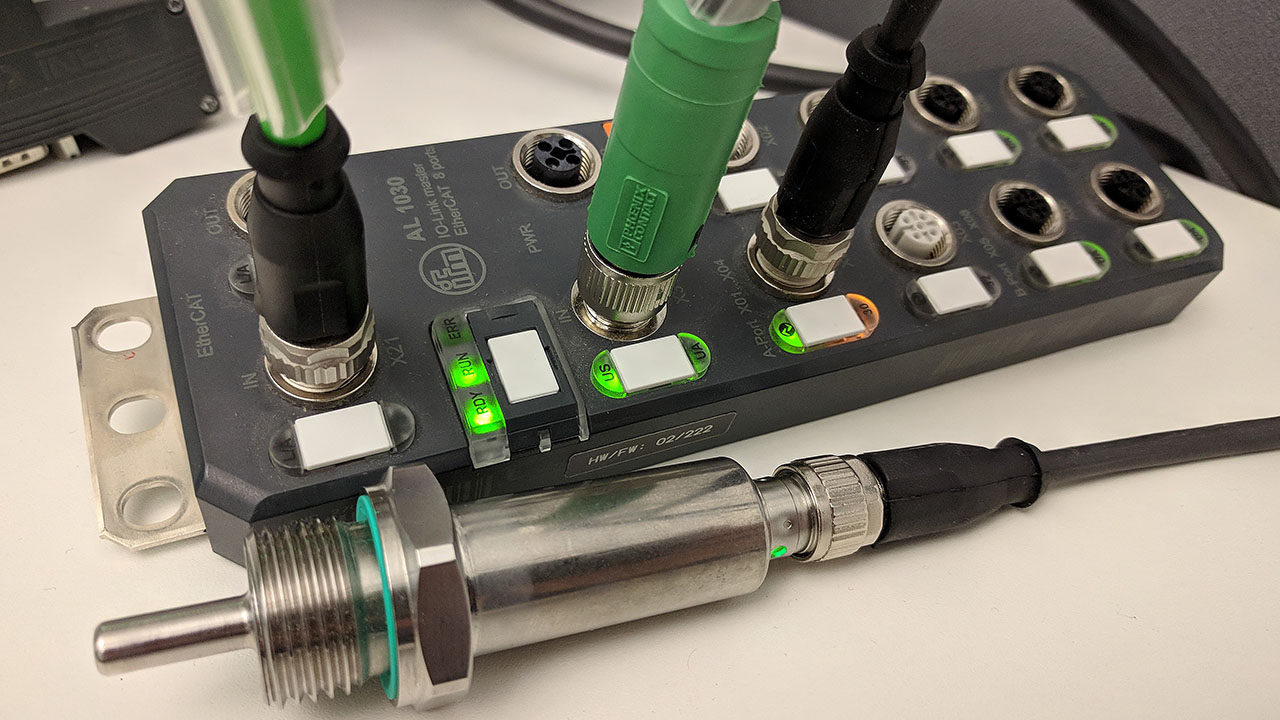
 We’re finally at the last post of this series! Patiently we’ve written all our tests and done all our code that implements the required functionality and made sure that our code passes all the tests. But in the end of the day, despite all the theory and coding we want our code to run on a real physical device. Now it’s time for the favorite part of every PLC programmer, which is getting down to the hardware and micro controllers! Let’s get to the grand finale, and test our code on a real PLC, IO-Link master and IO-Link slave.
We’re finally at the last post of this series! Patiently we’ve written all our tests and done all our code that implements the required functionality and made sure that our code passes all the tests. But in the end of the day, despite all the theory and coding we want our code to run on a real physical device. Now it’s time for the favorite part of every PLC programmer, which is getting down to the hardware and micro controllers! Let’s get to the grand finale, and test our code on a real PLC, IO-Link master and IO-Link slave.
 In
In 
 In the last post of the series of unit testing in TwinCAT we finalized our unit tests, thus creating the acceptance criteria for the expected functionality for our function blocks. Now it’s time to do the actual implementation of the function blocks that we described in
In the last post of the series of unit testing in TwinCAT we finalized our unit tests, thus creating the acceptance criteria for the expected functionality for our function blocks. Now it’s time to do the actual implementation of the function blocks that we described in 
 In the
In the 
 In the
In the 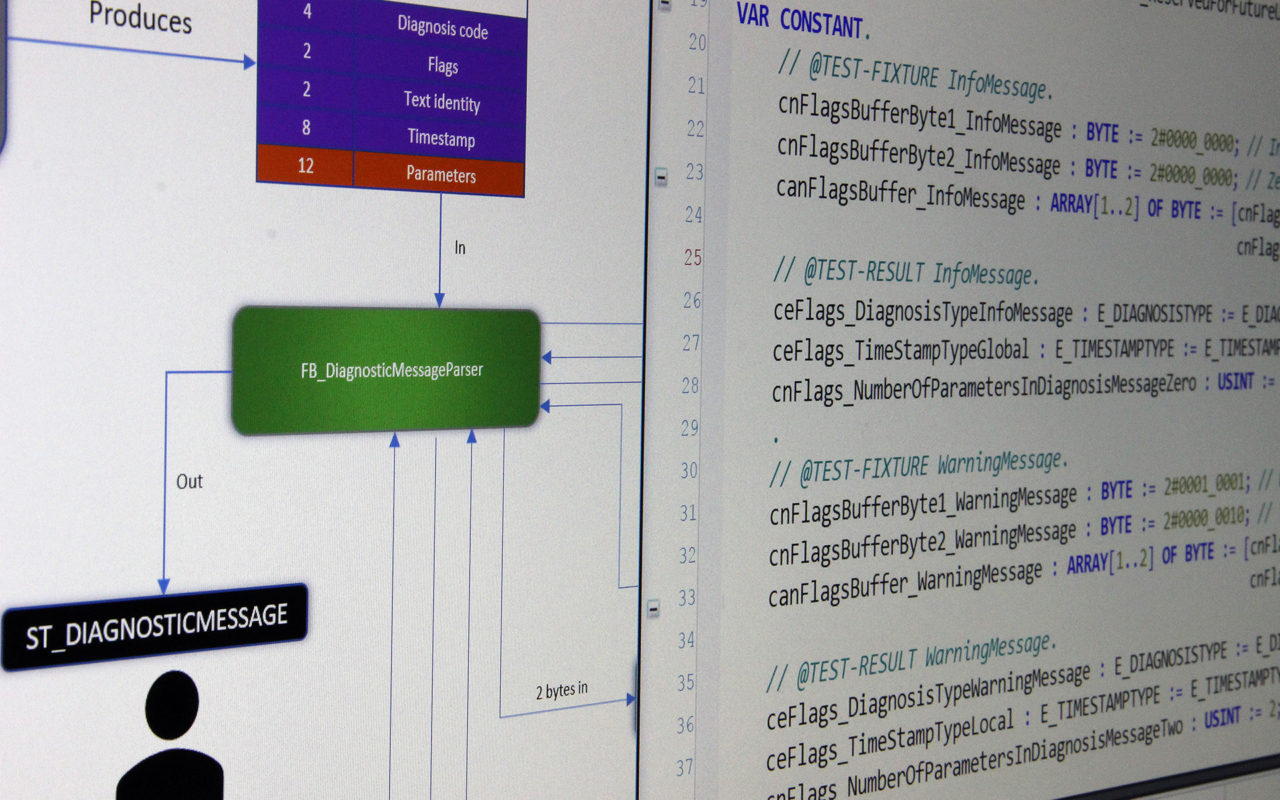
 In my
In my