The final part of the XPlanar series is out now! In this third and last part we will finish the TwinCAT 3 project we started and finally run the whole project in simulated mode.
XPlanar with Isaac Spear – Part 2

Part 2 of the XPlanar series is out now! In this second part we will create a new TwinCAT 3 project and get introduced to the XPlanar configurator. We will also start writing the software for XPlanar.
XPlanar with Isaac Spear – Part 1
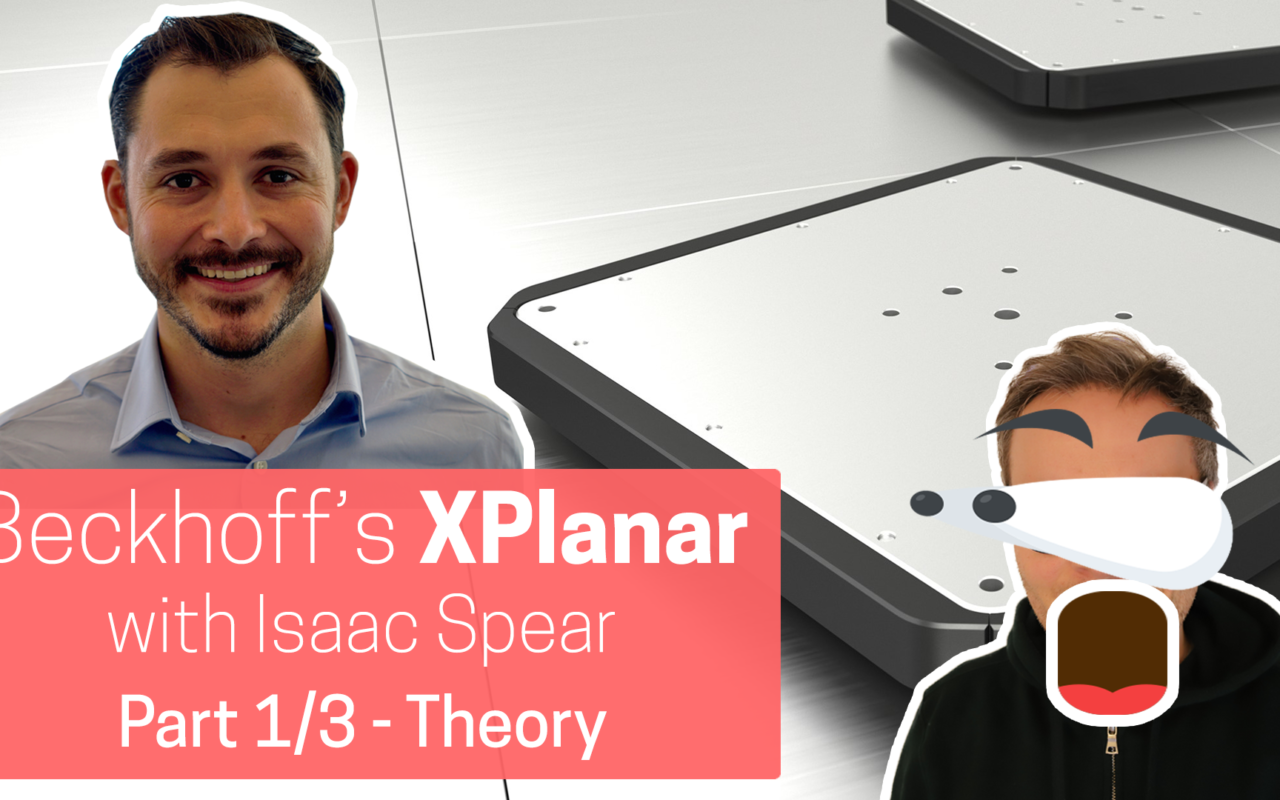
Together with Isaac Spear from Beckhoff Automation USA I’ve created a series of three videos where we will look into XPlanar, which is Beckhoff’s planar motor system, which combines the advantages of conventional transport technologies with magnetic levitation. In this first part we will get an introduction to the system and the theory behind it. In the later videos we will do some practice.
5000 YouTube subscribers celebration with F.A.Q.

I wanted to share with you a tiny celebration and some frequently asked questions, as I’ve recently reached 5000 subscribers on my YouTube channel. I didn’t even know whether there was 5000 people that work with TwinCAT 3 on planet Earth, let alone that would be interested in a TwinCAT 3 related YouTube channel!
Five years celebration

Today on this day five years ago, I published my first entry on this blog. These last five years have been an amazing trip, and the number of visitors has seen a steady growth.
PLC programming using TwinCAT 3 tutorial – part 8

Dear existing & future PLC software developers, I have published part 8 of my free PLC programming using TwinCAT 3 tutorial.
As TwinCAT 3 conforms to the IEC61131-3 standard, there are certain things it has to be able to do. The Tc2_Standard library has many of the standard IEC functions such as timers and triggers, which we will look into in this part of the tutorial.
PLC programming using TwinCAT 3 tutorial – part 7
Dear existing & future PLC software developers, I have published part 7 of my free PLC programming using TwinCAT 3 tutorial.
In this part we will go back to basics of IEC 61131-3 and structured text and look into instructions. This will cover IF/ELSE, CASE-switches and FOR/WHILE-loops. We will utilize our knowledge to write a CSV (comma separate value) event logger by using a state machine.
PLC programming using TwinCAT 3 tutorial – part 6b
Dear existing & future PLC software developers, I have published part 6b of my free PLC programming using TwinCAT 3 tutorial.
In this part we will continue our journey of the object oriented features of IEC 61131-3 and look into something called interfaces. Interfaces provide a layer of abstraction so that you can write code that is ignorant of unnecessary details. Interfaces aid you in designing more modular and robust software. With interfaces it’s possible to decouple direct dependencies between objects in your software.
1000 YouTube subscribers

I have reached 1000 subscribers on YouTube! I never thought I’d get anywhere close to this huge amount of subscribers, especially not this fast! Since I published the first episodes of the “PLC programming using TwinCAT 3 tutorial” in the beginning of March on YouTube, the channel has received over 30.000 views. It seems free PLC programming tutorials are appreciated. It’s time to celebrate and answer some questions that I’ve got from you viewers!
Handling different versions of TwinCAT
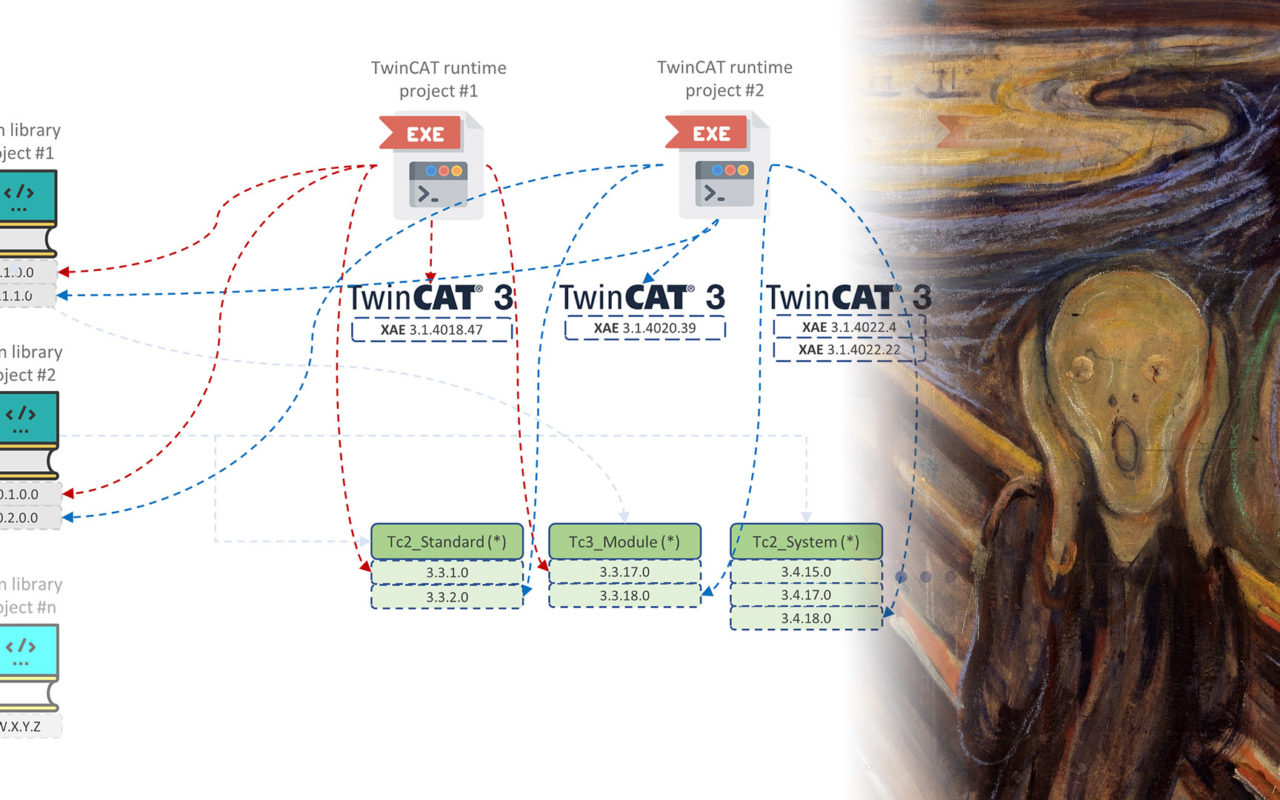
 Some time ago I wrote a post about developing code for different runtimes, and since then I’ve come to the realization that there is so much information missing in that blog post that I simply needed to write another one. What’s even worse is that the information regarding development, deployment, and just general handling of several TwinCAT versions on the Beckhoff website is not that good. I’ve talked to numerous automation engineers regarding this topic, and everyone seems to have a different understanding about it. As I was working in a development project that had many PLCs (hundreds!) with different versions of TwinCAT, I finally had a good excuse to dive into the details of this. With this blog post, I’d like to share some of the facts and misconceptions.
Some time ago I wrote a post about developing code for different runtimes, and since then I’ve come to the realization that there is so much information missing in that blog post that I simply needed to write another one. What’s even worse is that the information regarding development, deployment, and just general handling of several TwinCAT versions on the Beckhoff website is not that good. I’ve talked to numerous automation engineers regarding this topic, and everyone seems to have a different understanding about it. As I was working in a development project that had many PLCs (hundreds!) with different versions of TwinCAT, I finally had a good excuse to dive into the details of this. With this blog post, I’d like to share some of the facts and misconceptions.